
All about RC Servos: The Heart of RC Control
By James | October 9, 2025
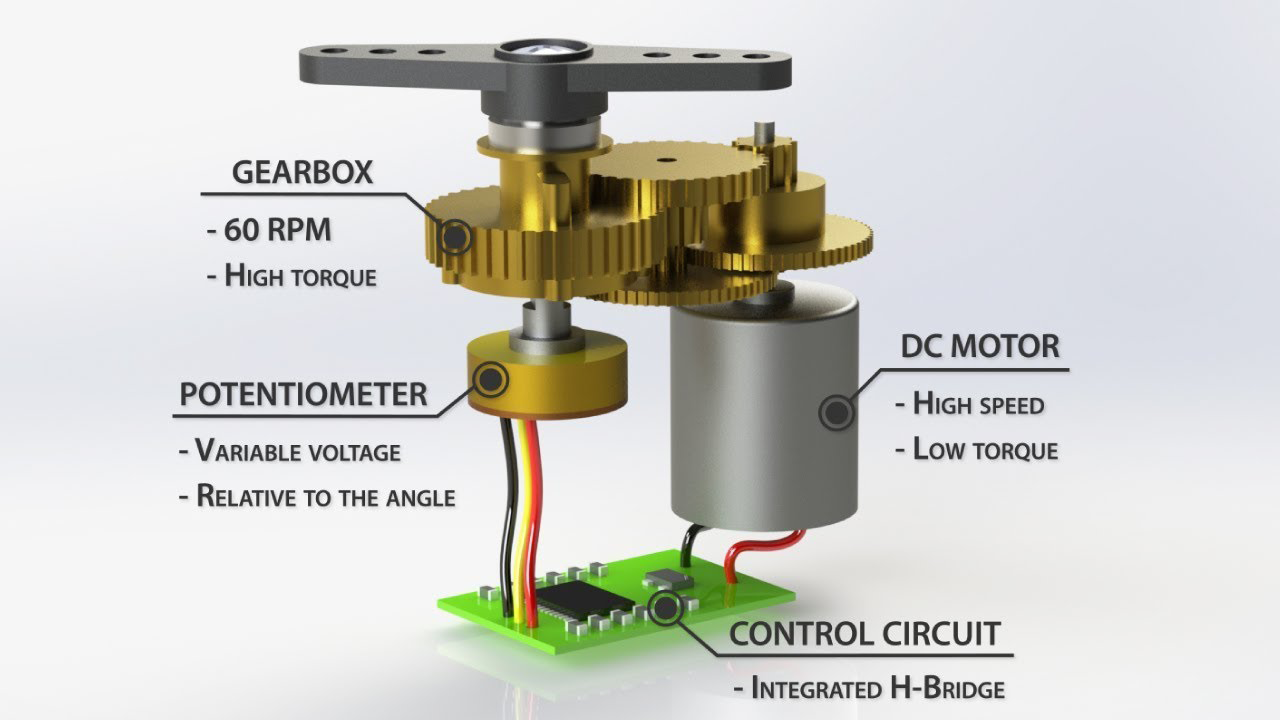
1. What is an RC Servo?
An RC servo (short for “servo motor”) is a compact electro-mechanical device that converts electrical signals into precise rotational movement. It’s what moves your airplane’s control surfaces — the elevator, ailerons, rudder — or the swashplate of your helicopter. Inside, a servo contains a small DC motor, reduction gears, a position feedback potentiometer, and a control circuit that positions the output shaft according to the signal from your receiver.
2. A Brief History of the RC Servo
RC servos have been around since the earliest days of radio control in the 1950s and 1960s. Early servos were heavy, slow, and used analog circuits with carbon potentiometers for feedback. Brands like Futaba and Sanwa pioneered commercial hobby-grade servos in the 1970s, helping RC models become more precise and responsive. As electronics miniaturized through the 1980s and 1990s, servos became faster, smaller, and more reliable — a key factor in the boom of RC airplanes, helicopters, and cars.
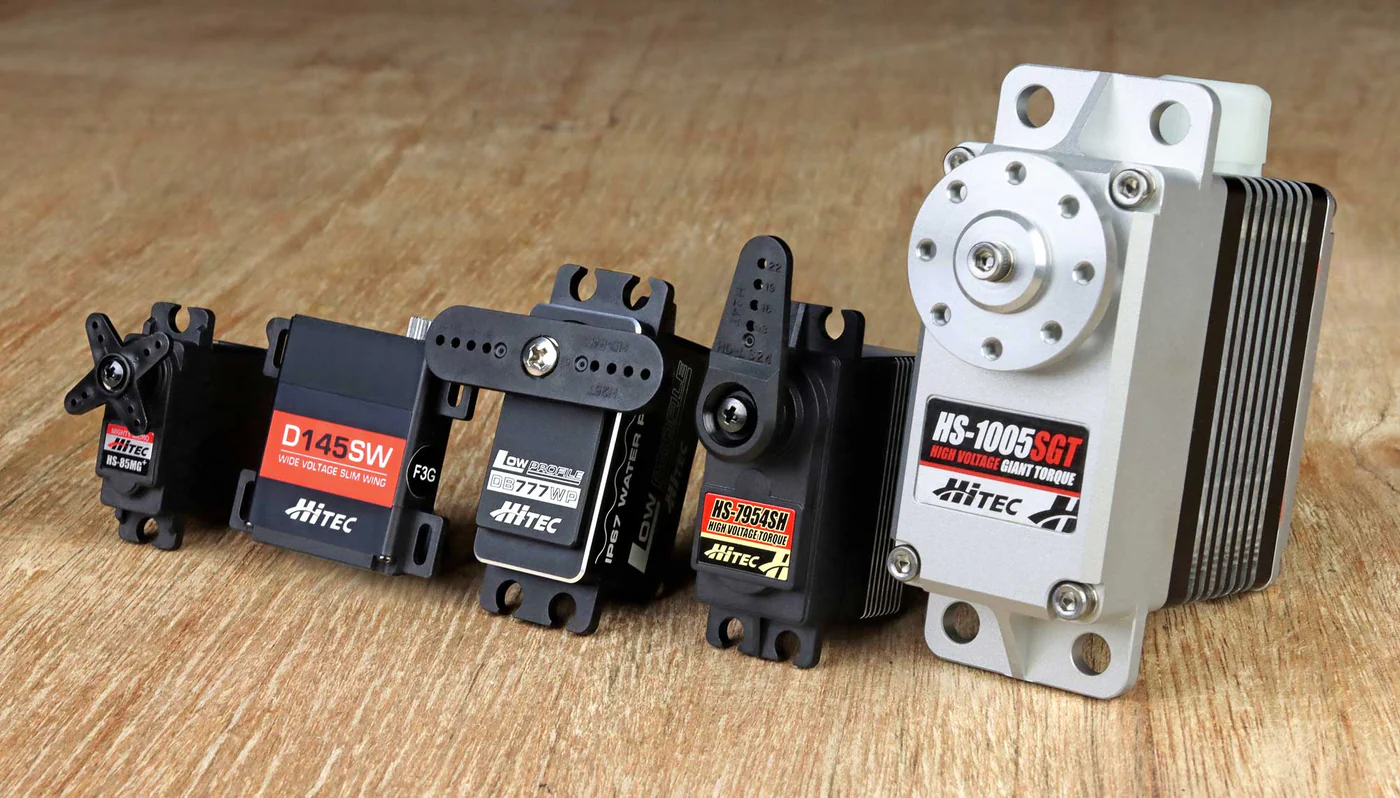
3. Servo Sizes and Classes
Servos come in a wide range of sizes, each suited to different models:
- Micro Servos (≤ 10g): Used for small park flyers, micro helicopters, or lightweight control surfaces.
- Mini Servos (10–25g): Common in foam airplanes and gliders where space is limited.
- Standard Servos (40–60g): The workhorses of the RC world — ideal for 40-size airplanes, most helis, and RC cars.
- Large/High-Torque Servos: Designed for giant-scale models, 3D aerobatic aircraft, and large helicopters where strength is critical.
4. Torque, Speed, and Voltage
Servo performance is mostly defined by torque (strength) and speed (time to rotate 60°). Torque is rated in kg·cm or oz·in; speed in s/60°. Both improve as supply voltage increases—if the servo is designed for it.
Traditional receiver power (NiMH)
- 4-cell NiMH (4.8 V nominal) — The classic setup for standard “4.8 V” servos. Safe and gentle, but limits peak torque/speed.
- 5-cell NiMH (6.0 V nominal) — Common upgrade for more punch. Works with most “6.0 V-rated” servos and receivers.
Modern high-voltage (HV) servos
HV servos are designed to run at 7.4 V nominal (2S LiPo) and typically tolerate up to 8.4 V (fully charged 2S: 4.2 V × 2). Benefits:
- Higher torque & faster transit at the same form factor.
- Simpler wiring when used with a proper high-current power distribution/regulation system.
Rule: Only power servos at voltages they’re rated for.
Never connect 2S LiPo directly to non-HV servos; use a regulator.
Regulators, BECs, and receiver power
- Linear/Buck Regulators (UBECs) — Step a battery (e.g., 2S LiPo) down to a safe bus voltage (e.g., 5.2–6.0–7.4 V). Choose units with ample continuous current and short peak handling for servo spikes.
- ESC BEC (in electric models) — Many ESCs include a BEC, but some are low current. For multiple digital/HV servos, prefer a separate high-current UBEC or a dedicated power box.
Power distribution / “PowerBox” style systems
On larger or high-load models (giant scale, jets, aggressive 3D), a dedicated power distribution unit is strongly recommended. These devices typically provide:
- Dual battery inputs (redundancy) with automatic switchover/OR-ing.
- High-current bus with thick traces/wiring to prevent voltage sag (brown-outs) under servo spikes.
- Regulated outputs selectable to 5.9/6.6/7.4/8.0 V (varies by unit) so you can safely run standard or HV servos.
- Per-channel buffering/matching (on some units) to reduce noise, split loads (e.g., dual aileron servos), and protect the receiver.
- Telemetry & monitoring (battery voltage/current, alarms) on higher-end units.
Examples (by concept): PowerBox-type units, Emcotec-style DPSI systems, or receiver-vendor “central box” hubs. The common idea: clean, redundant, regulated power and high current delivery to every servo.
Practical voltage setups
- Sport foamie / small glow: 4-cell NiMH (4.8 V) or good 5–6 V BEC → standard analog/digital servos.
- Mid-size aerobatic / EDF: 6.0–6.6 V regulated bus → metal-gear digitals for better holding power.
- Giant-scale / helis / jets: 2S LiPo packs feeding a power box set to 7.4–8.0 V (HV servos only), or dual packs with regulated 6.0 V bus for standard-voltage servos.
5. Analog vs Digital Servos
The difference lies in how the control signal is processed:
- Analog servos respond about 50 times per second — adequate for most sport models, and very smooth around center.
- Digital servos use a microprocessor to refresh the motor up to 300 times per second, offering faster response, higher holding power, and better precision — ideal for 3D and competition flying.
Digital servos do draw more current, so a robust power system is essential.

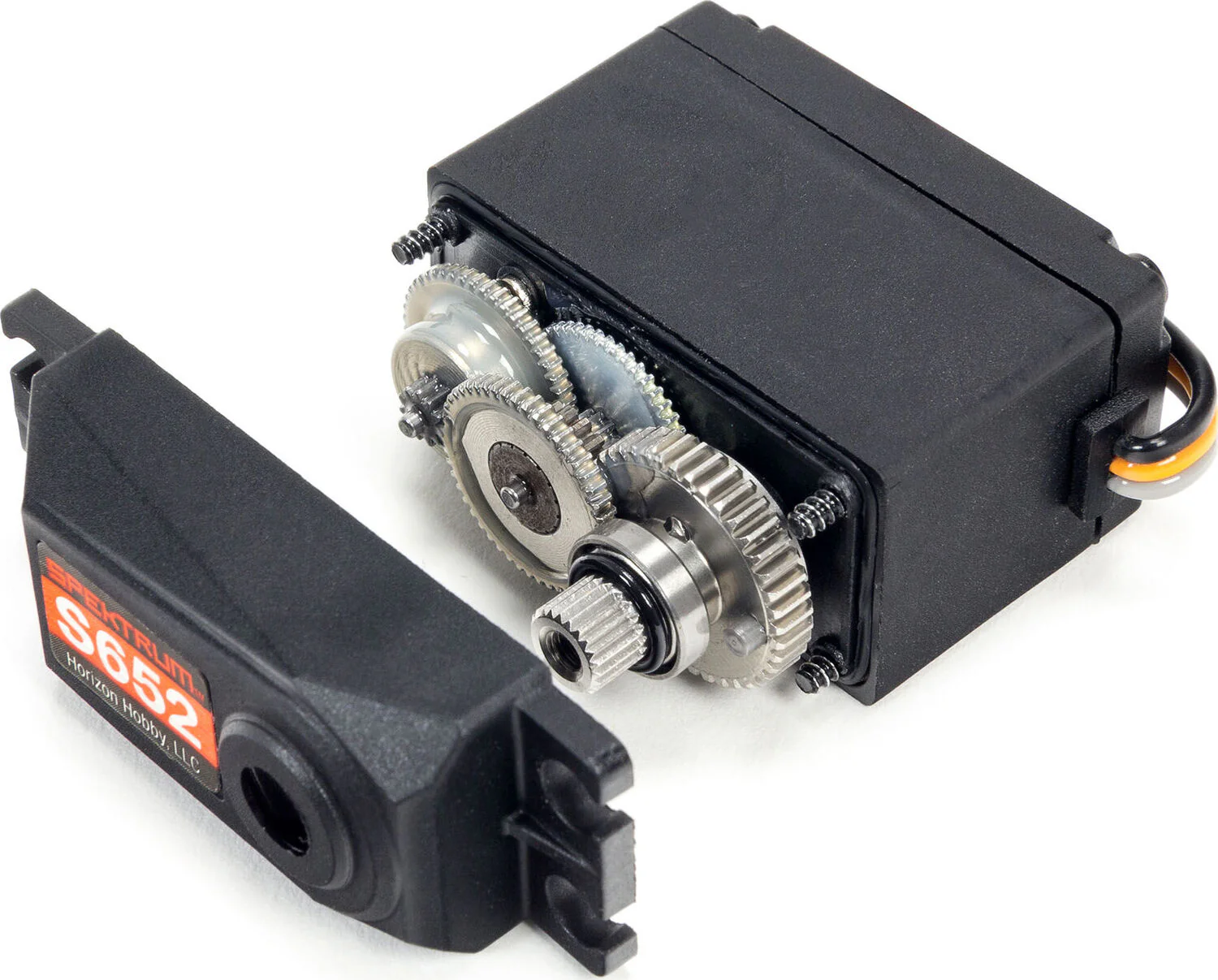
6. Gear Materials: Plastic, Metal, Titanium
The choice of gear material affects durability, noise, and cost:
- Plastic gears are lightweight, quiet, and inexpensive — perfect for smaller models or secondary control surfaces.
- Metal gears (usually brass/steel) handle much higher loads and are standard for sport and 3D models.
- Titanium gears offer top strength-to-weight ratio, near-zero wear, and are used in premium competition servos.
7. Servo Applications in RC Aircraft
In an RC airplane, servos control all standard surfaces (but also surfaces like flaps, air brakes, retractable mechanical landing gear, etc.):
- Elevator: Controls pitch (nose up/down).
- Ailerons: Control roll (banking turns).
- Rudder: Controls yaw (left/right nose movement).
- Throttle: Operates carburetor or ESC (electric).
Helicopters use servos to tilt the swashplate and control collective pitch — requiring precise, matched digital servos for smooth flight.
8. Top RC Servo Brands
Several brands dominate the RC servo market, each known for unique strengths:
- Futaba: Legendary reliability and smoothness, especially in airplanes and helicopters. Models like the BLS and S-Bus series are among the finest digital servos ever made.
- Hitec: Excellent value, widely used in sport and scale aircraft. The HS and HSR series cover everything from micro to high-torque metal gear servos.
- Savox: Popular for their high-torque brushless servos and robust performance — great for 3D flying, helis, and RC cars.
- JR / Sanwa / Power HD: Other respected manufacturers known for strong, precise, and consistent performance.
9. Tips for Choosing the Right Servo
- Match torque to model weight and control surface size — larger models need higher torque.
- Use digital servos for aerobatics or precise control, analog for general sport flying.
- Always secure servos firmly with rubber grommets to reduce vibration.
- Keep linkages free-moving — a binding pushrod can burn out even the best servo.
- Consider voltage: HV servos simplify wiring when powered directly from a 2S LiPo receiver pack.
10. You Get What You Pay For!
In RC modeling, few sayings ring more true than this one. When choosing servos, the temptation to save a few euros or dollars is understandable — after all, modern online marketplaces are filled with inexpensive options that promise high torque and lightning speed at a fraction of the cost of premium brands. The truth, however, is more nuanced: cheap does not always mean bad, but cheap does mean compromises.
Entry-level or budget servos are perfectly fine for small foam models, indoor aircraft, and other low-risk projects where weight, cost, and convenience matter more than long-term precision or endurance. But as your models grow — larger, heavier, faster, and more expensive — the potential consequences of servo failure become far more serious. At that point, it’s wise to invest in quality components from proven manufacturers like Futaba, Hitec, Savox, JR, or Sanwa. Supporting these premium companies also ensures they can continue producing reliable, high-performance hardware for our hobby’s future.
What makes a good servo?
The difference between a high-end and a low-cost servo lies in design priorities, materials, and quality control. Below is an overview of where compromises often appear:
| Metric / Property | What Premium Typically Offers | Where Budget Designs Often Compromise |
|---|---|---|
| Torque / Speed / Efficiency | Optimized motor winding, high magnetic efficiency, low rotor inertia | Less efficient motor design, heavier rotor, slower response |
| Resolution & Centering | Precision potentiometers or encoders, tight backlash control | Coarse potentiometers, gear slop, poorer repeatability |
| Gear Material & Durability | Hardened steel or titanium, smooth bearings, good tolerances | Inexpensive alloys, soft plastics, marginal bearings |
| Case Strength & Assembly | Rigid machined or reinforced case, proper mounting, strain relief | Weaker shells, poor alignment, fragile wiring exits |
| Electronics & Signal Stability | Clean PCB layout, quality filtering, robust feedback control | Lower-grade components, noisier signals, unstable feedback |
| Quality Control | Extensive testing, narrow tolerances, consistent batches | Loose tolerances, untested units, occasional defects |
| Longevity & Wear Resistance | Low-wear gears, sealed pots, stable soldering, quality grease | Faster gear wear, pot degradation, cracked solder joints |
Common failure modes of cheap or low-quality servos
- Stripped gears or broken gear teeth under load
- Sloppy centering or drift that worsens over time
- Electrical failures from weak solder joints or traces
- Potentiometer wear or contamination causing jitter
- Weak output spline or stripped servo horns
- Inconsistent behavior between units of the same batch
11. Servo Failure Modes & Diagnostics
Servos fail electrically, mechanically, or thermally — often a mix. Catching early signs prevents crashes. Use the observations and quick tests below to decide if a servo is healthy, marginal, or due for replacement.
Typical failure modes
| Subsystem | Failure mode | What you’ll notice | What to check / do |
|---|---|---|---|
| Gears & bearings | Backlash increase, chipped/stripped teeth, bent output shaft, worn bushings | Clicking under load, sudden “give” at center, flutter at speed, horn free-play grows | Rock the horn at center; feel for slack > 1–2 mm at a 25 mm arm. Inspect gears; replace set if teeth are dented or shafts wobble. |
| Potentiometer (feedback) | Wiper wear, contamination, track dead spots | Random twitches when passing certain angles, analog jitter at idle, poor centering | Slowly sweep through travel; if the surface jumps at the same angle every time, the pot is bad — replace servo or pot. |
| Motor | Worn brushes/commutator (brushed), demagnetized rotor, seized bearings | Loss of torque, uneven speed, increased current, heat rise | Stall test (brief): compare holding force to a known-good unit. If torque is notably lower or current spikes, retire it. |
| Amplifier/driver | Thermal shutdown, unstable control loop, bad solder joints | Works when cold, drifts or jitters when warm; recovers after cool-down | Run a 2–3 min wag test. If symptoms track temperature, suspect electronics; replace. |
| Wiring & connectors | Intermittent lead, broken strands at case, poor crimp | Power-ups/reset on vibration, “beeps” from RX/FBL, servo cuts in/out when wiggled | Gently flex the lead near the case; re-terminate or replace the servo if continuity is intermittent. |
| Environmental | Water ingress, dust, old grease, corrosion | Rough feel, noise, slow return, rust coloration in grease | Open & clean only if serviceable; otherwise replace. Avoid reusing contaminated gears/bearings. |
How to tell a servo is going bad (early warning signs)
- Center no longer repeatable: After moving full throw, it returns a little off each time (creep or random offset).
- Play grows quickly: Free-play at the horn increases over a few flights.
- Heat at idle: With no load, the case becomes hot (>50–60 °C) within 2–3 minutes.
- Noise changes: New grinding, clicking, or a harsher buzz that wasn’t there before.
- Voltage sensitivity: Jitter or resets appear as bus voltage drops slightly during movement (brownout margin is gone).
- Repeatable “twitch zones”: Surface jumps at the same angle → worn/dirty potentiometer.
Key metrics that separate good from bad
| Metric | What it is | Rule of thumb (sport/heli) | How to check (bench) |
|---|---|---|---|
| Deadband | Input change required before output moves | Good: ≤ 2–4 µs (~0.1–0.2°). Marginal: 6–8 µs. >10 µs feels sloppy. | Micro-step subtrim in TX/FBL and watch for first motion at the horn. |
| Backlash (gear slop) | Free rotation at output with no input change | At a 25 mm arm: Good: ≤ 1 mm tip play; Marginal: 2–3 mm; >3 mm is poor. | Neutral the servo, gently rock the horn by hand; measure tip motion. |
| Centering accuracy | How close the servo returns to the exact center every time | Good: ≤ 0.5–1.0°; >1.5° is noticeable on fast models. | Mark neutral, sweep full throw 10×, check where it stops each time. |
| Holding current / heat | Power needed to hold position at rest | Should stay warm, not hot: <~50 °C case temp in free air at idle. Rising temp at neutral = binding or overdrive. | Touch test or IR thermometer after 2–3 min of aggressive stick wag. |
| Speed consistency | Same transit time across throws and temperatures | Large variance with heat suggests electronics/motor fatigue. | Time 60° moves cold vs warm; compare left vs right. |
| Stall torque (relative) | Resistance to being back-driven | Should not degrade noticeably vs a known-good unit of same class. | Carefully load surface by hand (prop/blades off!); compare feel. |
Analog jitter vs Digital buzzing — what’s normal?
Analog servos (jitter)
Analog servos sample the signal at ~50 Hz. Small noise on the RX line or tiny pot fluctuations can show up as visible jitter, especially near center where torque is low. Mild, occasional twitch at neutral is common on cheaper analogs and often harmless. If it worsens, check power quality, leads, and potentiometer wear.
Digital servos (buzzing/hunting)
Digitals refresh the motor hundreds of times per second to hold position tightly. A light buzz at neutral is usually normal — it’s the control loop making tiny corrections. It becomes a problem if the case gets hot at idle, the surface visibly vibrates, or current draw spikes. Causes: linkage binding, excessive frame rate (signal update too high), or unstable tuning in some FBL/gyro setups. Reduce mechanical load, verify straight linkages, and try a lower frame rate (e.g., 200 Hz → 165 Hz → 65 Hz) until heat/noise subsides.
Five quick bench tests (no fancy tools)
- Neutral heat check: Power the model (prop/blades off). Leave sticks centered for 2–3 min. Warm is fine; hot is not.
- Full-throw wag: Move quickly end-to-end for 2 min. Watch for slowing, resets, or growing buzz/heat.
- Center repeat: Mark neutral; sweep full throw 10×. Does it return to the mark within ~1 mm at the control tip?
- Slop measure: At neutral, gently rock the horn. More than ~2–3 mm at a 25 mm arm → service or replace.
- Wiggle the lead: Gently flex the wire at the case. Any cut-outs or resets = failing lead/connector.
12. Conclusion
The humble RC servo is the unsung hero of every radio-controlled model. It translates pilot inputs into smooth, precise motion — and decades of engineering refinement have made modern servos faster, stronger, and more reliable than ever. Whether you’re building a park flyer or a 3-meter aerobatic giant, choosing the right servo is critical for safe, responsive, and enjoyable flying.
I am personally a big fan of FUTABA, HITEC and SAVOX and I highly recommend these brands for all your servos (I am not sponsored by them). Even if you fly foampies, small and cheap planes, I still recommend to go for the premium brands!